7.1- O MOTOR ELÉCTRICO E O “ESC”
7.2 -Introdução
Sobre este assunto diremos apenas o básico, mas essencial
Tipos de motor usados em aeromodelos:
- Tipo Brushed Inrunner
- Tipo brushless Inrunner
- Tipo brushless outrunner
Brushed Inrunner -
Tipo clássico de motor em que a conexão de corrente ás espiras é feita através de “ escovas” de grafite encostadas a segmentos do eixo rotativo. Alimentação por corrente contínua a dois bornes
Brushless Inrunner e outrunner
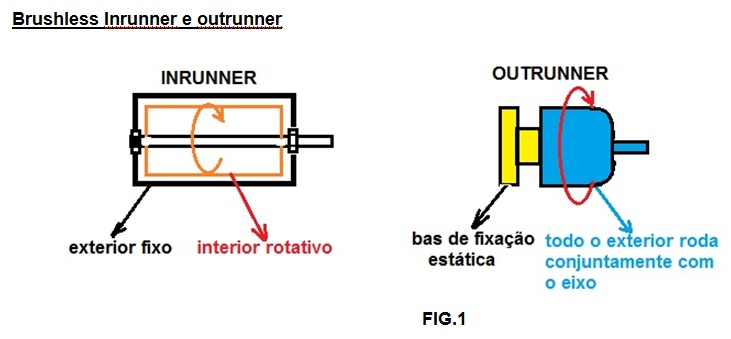
Brushless Inrunner –
Este motor não tem escovas e a carcaça exterior é estática
Brushless Outrunner -
Este motor não tem escovas e a carcaça exterior roda conjuntamente com o eixo
OBSERVAÇÕES :
1 – O motor com escovas apresenta regra geral muito menor rendimento electromecânico que o motor sem escovas (brushless)
2 – Os motores sem escovas são geralmente preferidos aos de escovas
3 – Os motores sem escovas são alimentados por corrente pulsada, por três terminais.
4 - O motor sem escovas “inrunner” é muitas vezes de mais fácil montagem que o “outrunner” e não impõe tantas vibrações ao aeromodelo como o outrunner, mas pode apresentar maiores problemas de aquecimento.
5 – Pelas nossas pesquisas os motores “inrunner” apresenta altas potências mas valores de Kv mais baixos que os outrunner.
AS CARACTERÍSTICAS DO MOTOR
Motor sem escovas, outrunner:
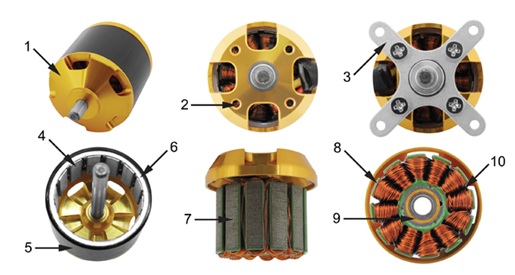
FIG.7.2
1- Parte da frente com janelas de ventilação desenhadas de modo a provocar uma corrente de ar de arrefecimento para dentro do motor á medida que roda
2- Parte de trás , preparada para fixação a uma “parede” ou outra peça
3- Cruzeta que pode ser adaptada á base 2 e fornecer um melhor meio de fixação do motor
4- Magnetos de MdFe B, especialmente concebidos para trabalhar a temperaturas altas
5- Encapsulamento exterior
6- Anel que permite o posicionamento e fixação dos magnetos no seu lugar, com o espaçamento devido entre eles
7- Estator de enrolamentos
8- Enrolamentos de fios cobre em espiral
9- Caixas de rolamentos para o eixo
Os vendedores de motores sem escovas dão-nos , geralmente a seguinte informação :
Kv do motor – è o nº de rotações por minuto ( rpm ) por volt nos seus terminais
Por exemplo se o Kv de um motor é Kv=1200 isso significa que se aplicarmos uma voltagem V= 7 V nos seus terminais o o eixo do motor vai rodar a rpm = 7*1200 = 8400 rpm. Isto não é bem verdade, ver adiante um cálculo preciso)
A sua resistência interna Ri em Ohms – quantomaior for o valor de Ri maior a perda de potência devido a P= Ri*I2, e, obviamente maior o aquecimento do motor para uma dada corrente.
A corrente sem carga I0 do motor – ou seja a corrente que percorre o motor quando este não está em carga ( o seu eixo não faz qualquer esforço, não acciona nada)
Quanto menores forem I0 e Ri, maior o rendimento do motor. Qualquer motor apresenta um rendimento abaixo de 100% obviamente. O SEU RENDIMENTO é definido como o rácio de energia eléctrica fornecida aos seus bornes e a energia mecânica que devolve no seu eixo.

FIG.7.3
Os motores com escovas, raramente ultrapassam rendimentos de 80% , enquanto os motores sem escovas atingem rendimentos de 90% ou mais.
7.3 - O “ESC” ( Electronic speed controller)
O variador electronic de velocidade, vulgo ESC, vai controlar a velocidade do motor. O que o ESC faz, essencialmente é transformar uma corrente contínua em pulsada e variar o tempo decorrido entre “pulsos” e/ou dos próprios “pulsos”. A figura seguinte dá uma ideia aproximada desta função

FIG.7.4
O ESC transforma uma corrente /voltagem de valor constante e contínuo num valor pulsado.
1 - A bateria fornece ao ESC energia de modo contínuo
2 – O ESC transforma a corrente em pulsada. Portanto haverá períodos de tempo em que o motor não recebe energia, aqui representados por t. Entre esses períodos t, teremos os períodos T em que o motor recebe energia. È assim possível regular a proporção entre T e t de modo a fazer variar a velocidade de rotação do motor.
3- O ESC produz e envia para o motor três correntes deste tipo desfazadas entre si, o que vai permitir ao motor trabalhar sem escovas. ( daí os três fios entre o ESC e o motor)
7.4 - COMBINAÇÃO MOTOR +HÉLICE + ESC + BATERIA
Podemos salientar os seguintes aspectos fundamentais:
- O motor tem que fornecer á hélice a energia necessária para ela rodar a um número determinado de rpm - Rotações Por Minuto, para manter um voo estável
- Tem que também ter a potência necessária para as descolagens, aterragens e manobras aéreas
- A energia a debitar tem de estar relacionada com:
1- Peso total do modelo
2- Características aerodinâmicas
3- Missão
- O motor não pode ser nunca independente das características da hélice que acciona
Como temos um objectivo eminentemente prático faremos primeiro um resumo do que encontrámos sobre esta matéria:
7.4.1 – ABORDAGEM CLÁSSICA
Tabela I- Guia de Potência , de Shaw
Potência bruta por Kg de peso
Potência aplicada Tipo de aeromodelo
A - 100W /Kg -------------------- Sport, subidas rápidas, planador
B - 140 W/Kg--------------------- Classico
C - 160 W/Kg--------------------- Sport, acrobático
D - 160 W/Kg--------------------- Competição de velocidade
E - 160 W/Kg --------------------- Modelos militares e acrobáticos
F - 180 W/Kg----------------------Modelos acrobáticos de competição
G - 200 W/Kg --------------------- Modelos de competição
Esta tabela é a informação mais simples, mais sintética que podemos encontrar, mas, no seu tipo não é a única, e algumas, semelhantes, divergem bastante nos valores de potência/peso por tipo de aeromodelo.
Se quisermos encarar este problema com esta simplicidade, não deveremos esquecer que a tabela se refere a “potência bruta” e que o sistema de motorização será do tipo da figura seguinte:
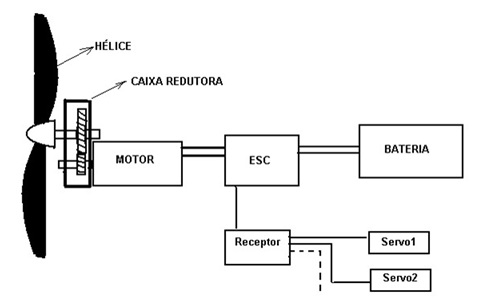
FIG.7.5
Num sistema existem perdas e, claro que no sistema Bateria → ESC→Motor → Caixa Redutora→ Hèlice, nenhum elemento tem um rendimento de 100%. Deste modo, sendo o rendimento de cada elemento:
- Bateria - B%
- ESC - E%
- Motor - M%
- Caixa redutora - C%
- Hélice – H%
A potência total que o sistema tem que ter disponível será :
Pt = P0 /( B*E*M*C*H)*10-10
Onde P0 é potência a ser fornecida á hélice.
Uma questão essencial a responder é : Qual a mínima potência para manter o aeromodelo no ar em voo horizontal estabilizado ?
Segundo Anderson essa potência é dada por :
P = 1.484*[ W/(L/D)]*V
Sendo: W- peso do aeromodelo em Kg
(L/D) – Racio entre o Lift e o drag nas condições de voo
V – Velocidade de voo em Km/h
O valor mínimo de potência necessária pode ser calculado da equação usando para V a velocidade de estol.
O valor máximo para a potência necessária pode ser calculado usando na equação 2 o valor máximo de velocidade pretendida.
Exemplo: Temos um aeromodelo pesando 1.2 Kg. O rácio L/D é : L/D=10. A velocidade de estol calculada é Ve = 25 Km/h.
Por estes dados vemos que, para potência mínima teremos : = 1.484*1.2/10*25=4.45 W
Usando estes valores na primeiraequação e admitindo que estimamos os seguintes rendimentos:
- Bateria - B% = 90%
- ESC - E% = 90%
- Motor - M%= 80%
- Caixa redutora - C% ( sem caixa redutora) =100%
- Hélice – H%= 40%
Obtemos : 4.45/(90*90*80*100*40)*10-10 = 17.1 W
Para potência máxima, admitindo uma velocidade de ponta de 70 Km/h virá: 1.484*1.2/10*70=12.5 W e, do mesmo modo :
Pt = 12.5/(90*90*80*100*40)*10-10 = 48.2 W
Mas nestes cálculos cometemos um ERRO : A velocidades diferentes, nem o rácio L/D nem a eficiência da hélice, H%, serão iguais. Todavia podemos compensar esses erros
1º Lembremos que, no capítulo “ASA COMO ELEMENTO FUNDAMENTAL DE VOO”, temos não só os meios de calcular a velocidade de estol, como os gráficos polares CL- CD, em função do número de Reynolds, Ry. Ora Ry vai de pender de V e portanto podemos determinar L/D para uma velocidade em particular usando o programa: QFLR5
2º - Quanto á hélice o cálculo da sua eficiência , H%, está dependente de factores vários e apresentamos este assunto no capítulo: A HÈLICE.
3º - Esta abordagem exige o conhecimento dos rendimentos dos elementos do sistema. Mas todos esses elementos apresentam um rendimento que não é constante e que vai depender do seu “regime” de trabalho. Para mim, o mais difícil de tratar, neste aspecto, é certamente a Hélice
7.4.2 - UMA ABORDAGEM USANDO UM PROGRANA ( A)
Muitos autores estabelecem como regras básicas as seguintes:
1ª – A velocidade de “Pitch” deverá ser de 2 a 3 vezes a velocidade de estol - ( Ve) - do modelo.
2ª – O Impulso estático deverá ser de 1/3 a ½ vezes o peso do modelo.
Na primeira regra teremos de considerar a hélice, os seus parâmetros e o número de rotações a que vai trabalhar. Será necessário ver no capitulo A HÉLICE pormenores sobre este assunto, recordando que:
De um modo geral a hélice para um aeromodelo é definida pelo seu diâmetro - D e pelo avanço ou “pitch” . Não é preciso dizer nada sobre o diâmetro mas o Pitch será diferente... de uma forma muito siplificada o Pittch de um hélice será o espaço que ela avança, na direcção da sua rotação, numa rotação completa.
O pitch de uma hélice depende fortemente da inclinação das suas pás em relação ao eixo que passa pelo centro do cubo. No entanto, é preciso notar que, quer a espessura da pá, quer a sua largura quer o ângulo variam ao longo do seu comprimento, desde o cubo até ao extremo.
Se calculamos para o nosso modelo exemplo anterior, uma Ve= 25 Km/h = 6.94 m/s, então teremos de ter uma velocidade de Pitch – Vp = 2.5 x 6.94 = 14.4 m/s. Se o Pitch da nossa hélice for 5” = 12.7 cm =0.127 m , para obtermos esta velocidade ela deverá trabalhar a 113 rotações por segundo = 6.800 rpm. Temos assim uma primeira escolha de hélice e nº de rotações.
Considerando a segunda regra temos o problema de calcular o Impulso estático do conjunto MOTOR – HÉLICE, ou seja, o impulso em Newtons ou Kgf que a hélice produz com o aeromodelo parado. Nesse aspecto temos dezenas de programas na net que o podem calcular:
PROGRAMA - A: http://www.adamone.rchomepage.com/calc_motor.htm
(Este é um excelente programa para calcular a motorização!)
DADOS
Vamos usar uma hélice APC de 9 x 4.7 pol.( Relembramos que o valor Kv é o número de RPM do motor por volt aplicado aos seus terminais)
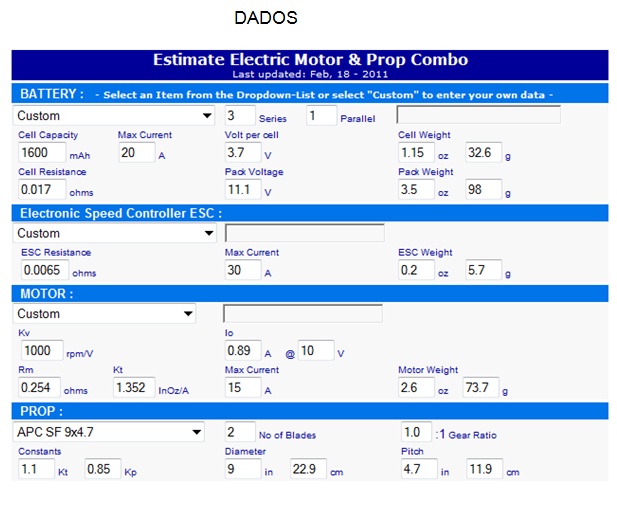
RESULTADOS DO PROGRAMA

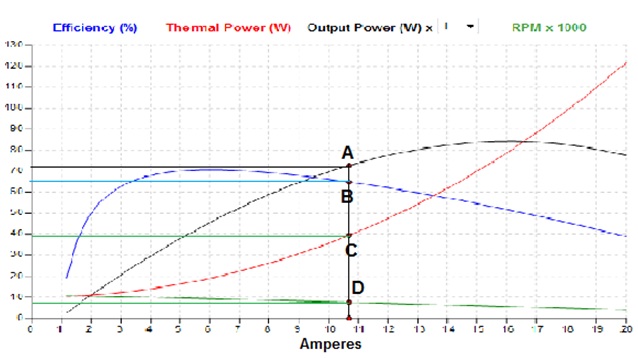
FIG.7.6
Portanto 634 g de impulso estático, o que se situa no extremo superior do nosso desejado intervalo de 1/3 a ½ do peso do modelo.
Por outro lado A Vp aumenta dos previstos 14.4 m/s para 15 m/s, que excede o valor limite inferior de 2 vezes a Ve.
Notemos também que a potência total a aplicar é 112.2 W, da qual só é aproveitada para impulso 72.7 W, com um rendimento de 64%
7.4.3 - VERSÃO DE CALCULO MANUAL
Segundo Stefan Workoetter o diâmetro e o pitch de uma hélice afectam a energia necessária para a fazer rodar a dadas RPM , pela expressão
P = k x rpm3 x D4 x Pitch
( Esta é uma expressão eminentemente empírica, porque contem em si mesma a parte que diz respeito á variação de eficiência da hélice e terá de ser olhada com as limitações que na realidade tem.)
O factor K depende das unidades que usamos na expressão. Assim, para energia, (Potência) em Watts e o diâmetro e pitch em polegadas , K é :
K= 5.3*10-15 .
Então, a potência necessária para fazer trabalhar a nossa hélice de 9 x 4.7 a ~7500 rpm será:
P = 5.3*10-15 * 75003 * 94 * 4.7 = 69 W
Mas este é o valor da potência consumida pela hélice, o que não se afasta muito dos 72.7 W obtidos no programa A!
Tendo o motor e a baterias escolhidas, podemos agora calcular outros parâmetros de funcionamento:
Definição do motor: Brushless ; Kv= 1000 rpm/v ; Rm= 0.254 Ohms ; I0= 0.89 A., Imax= 20 A ;
Bateria : LiPo-3S- (11.1 V) – 15C – 1600 mAh
Então temos, por um lado : P = k x rpm3 x D4 x Pitch
Por outro lado, como P = V*I então P = (V- I*Rm)*(I- I0)
Como : k x rpm3 x D4 x Pitch= (V-I*Rm)*(I-I0)
Substituindo valores, e, dado que rpm= Kv*V = Kv*(11.1- I*Rm)
5.3*10-15 * ((11.1- I*0.254)*1000)3 * 94 * 4.7 = (11.1- I*0.254)*(I-0.89)
0.1635* ( 11.1- 0.254*I)3 = (11.1-0.254*I)*(I-0.89)
Usando um programa de Excel para resolver esta igualdade obtemos :...I = 11.6 A
CONCLUSÕES:
1 – Concluimos assim que a nossa corrente vai ser muito aproximadamente I =11.6 A
2 – A potência consumida na hélice será P= 69 W
3 - A potência no motor será : 11.6*(11.1) = 128 W
4 - Se a bateria for uma LiPo 3S 1600 mAh teremos que olhar para o seu valor de C. Suponhamos que C=15…. Então a bateria será capaz de fornecer uma corrente máxima de 15*1600 mAh = 24 A, o que é o dobro dos 11.6 A calculados e estará bem.
5 - O ESC, deverá suportar esta corrente, portanto um ESC de 20 A estará bem.
6 - Com respeito ao motor, ele suporta um Imax. = 20 A, e tendo nós I =11.6 A também estará bem. (Todavia teremos que ter atenção ao seu aquecimento porque com uma corrente de 11.6 A e uma resistência de 0.254 Ὠ o calor dissipado por unidade de tempo será : R*I2 = 0.254*134.6= 34.2 J = 8.2 cal/s)
7 - A potência total, calculada por P=VI vai ser : 128.8 W
8 - Como vemos, quer a corrente quer a potência dão valores mais elevados que os obtidos com o PROGRAMA – A,( 11.6 contra 10.7 A e 128.8 W contra 112.2 W), mas na nossa opinião o método continua a ter certa credibilidade!
Para calcular o Thust estático, I.E., podemos usar um método aconselhado por Edison da Rosa, baseado na expressão:
( Para este processo de cálculo deverão ser considerados os devidos créditos ao Prof. Edisom da Rosa)

Sndo o valor de Kt tirado da curva:
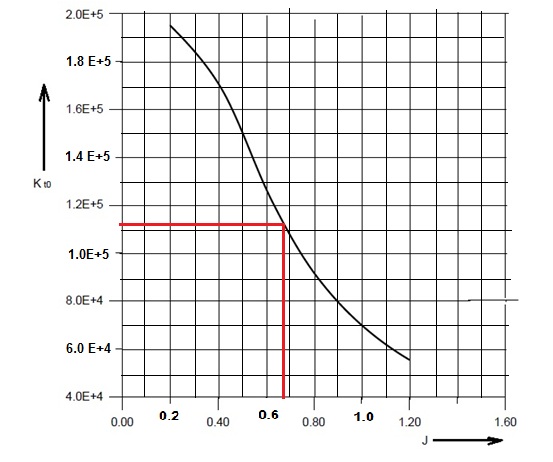
FIG.7.7
Onde J é o avanço em condições de rendimento máximo. Para o exemplo acima essa condições serão :
rpm = 11000
rps = 183.3
Pitch da hélice = 4.7 “ = 0.12 m
Diâmetro da hélice = 9” = 0.229 m
Velocidade máxima = 11000/60*pitch = 183.333*0.12 = 22 m/s
Então : J = V/(nD)= 22/(183.3*0.229) =0.524
Com este valor obtemos da curva acima : Kt = 1.5 *105
Podemos agora calcular agora, pela expressão anterior
T0 = 1.5*105*0.069/(10028*0.12) = 4.48 N---457 g
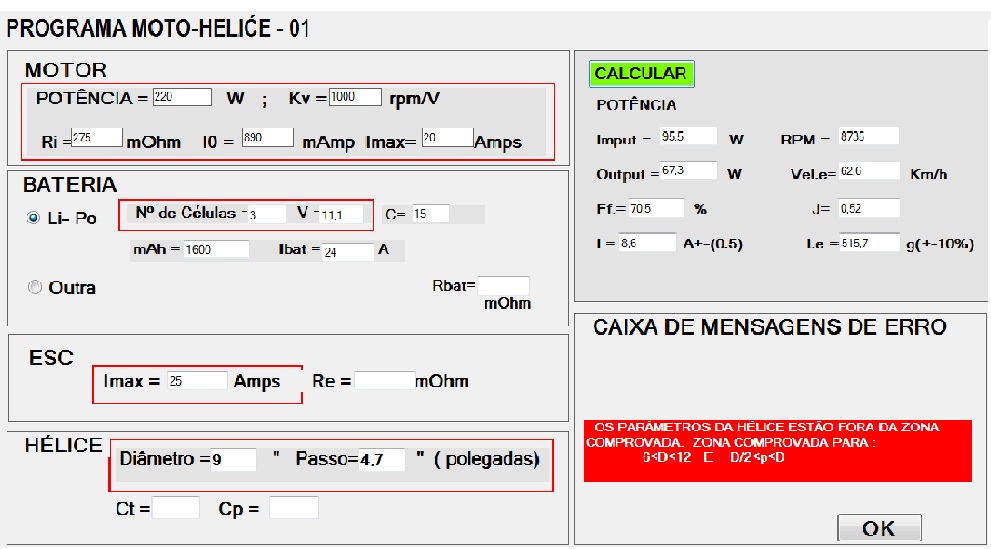
7.4.4 - VERSÃO DO MOTO-HÉLICE 01
Elaborámos entretanto um pequeno programa, onde tentámos "fugir" ao problema dos coeficientes da hélice , usando algoritmos para valores médios.
DADOS E RESULTADOS- MOTO-HÉLICE 01
Podemos agora comparar resultados na seguinte tabela
| Origem |
Pi(W) |
P0(W) |
E(%) |
I(A) |
RPM |
I.E ( g) |
| Programa A |
112 |
73 |
65 |
11 |
7550 |
634 |
| Manual |
128 |
69 |
54 |
12 |
8153 |
457 |
| Mot-HEL. |
95.5 |
57 |
70 |
9 |
8730 |
516 |
Entretanto, progredimos com a difícil questão da hélice e estamos já a elaborar o MOTO - HÉLICE 02, que esperamos , nos forneça valores muito mais próximos dos verdadeiros.
TOPO


